|
AUTOZINE TECHNICAL SCHOOL
4-Wheel Drive 4WD with Electronic (Active) torque split:
Honda SH-AWD - Honda Legend / Acura RL (2005) The first generation SH-AWD used in the 2005 Honda Legend (Acura RL) was a very clever invention. Not only its working principle is unique in the industry but it is highly capable to transform the handling of a heavy front-wheel-drive vehicle. Normally when running on straight, the system distributes 70:30 torque between front and rear wheels. When the car maneuvers, it may send up to 70 percent torque to the rear. Moreover, all that torque could be directed to either side to implement torque vectoring. This greatly enhanced the agility of Legend. The core of SH-AWD is the rear drive unit (RDU) mounted at the rear axle. It consists of an accelerator and 2 independent sets of planetary gear and electromagnetic multi-plate clutch unit, one for each rear wheel. The accelerator takes power from the prop-shaft, uses its own planetary gears to speed up the rear axle, creating a speed difference for the multi-plate clutches to take power. Without this speed difference, the SH-AWD would have worked like a Haldex clutch and failed to deliver permanent drive to the rear wheels. Normally the speed difference is only 1.7 percent, just enough to load up the rear clutches without causing too much wear and energy loss. When turning in tight corners, such a small speed difference could diminish to zero or negative as the front wheels always turn faster than the rear in curve. Therefore, the accelerator offers another set of planetary gears which enables a speed difference of 5.7 percent. A hydraulic actuator and clutch in the accelerator select between the 2 sets of planetary gears according to the instruction of ECU. 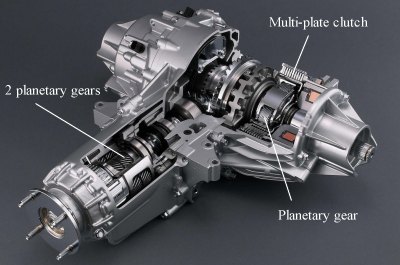 Behind the accelerator, there is no conventional differential. The hypoid gear couples the drive from the accelerator to the ring gear of each planetary gear set. The ring gear transfers power through 3 planetary gears to the rear half shaft, which is rigidly connected to the carrier of planetary gear. Meanwhile, the sun gear of the planetary gear set is connected to half the clutch plates, while another half are mounted at the stationary RDU housing. These clutch plates are actuated by electromagnetic force. When the clutch is open, little torque is transfered to the rear wheel as the sun gear is free to spin. The more the clutch engages, the more torque transfers from the ring gear to the planetary gear carrier (hence rear wheel) as the sun gear is increasingly locked up. At maximum pressure, 70 percent torque is transferred to the rear axle, although the clutches are still slipping (because the speed difference always exists as a result of the accelerator). By engaging one clutch pack and opening another, all of those torque could be sent to one side thus greatly improves the car's agility. 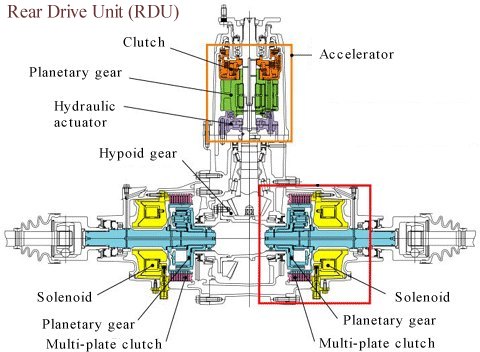 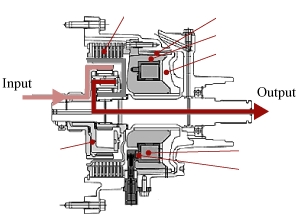 Now you might ask, why not simply ditches the complicated planetary gear sets and uses the multi-plate clutches to engage the rear wheels directly? Well, because the planetary gear sets are deliberately introduced to lessen the workload of multi-plate clutches. Since the clutch is attached to the sun gear, while the output half shaft is attached to the carrier of planetary gears, they move at different speeds. The gear ratio between sun gear and planetary gear results in multiplication of torque. In other words, for a given torque transfer to the rear wheel, the clutch is subjected to only a fraction of the torque. This greatly reduces wear and energy loss at the multi-plate clutches, and explains why the SH-AWD managed to transfer 30 percent torque to the rear axle permanently without overheating or demaging the clutches. Evolution However, as you can see, the original SH-AWD hardware was mechanically sophisticated thus expensive to build. That is why it was used by only the company's flagship executive car. To make it more accessible to cheaper cars, Honda made some compromises in the following years... On the 2008 Acura TL, the accelerator was ditched and replaced with a fixed gearing that overdrove the rear axle by 1.7%. This inevitably hurt its performance in tighter corners. On the 2014 Acura TLX, the pair of planetary gear sets and electromagnetic clutches was also dropped in favour of 2 electrohydraulic clutches. These clutches are stronger and more durable thus can withstand all the torque to the rear wheels, which has been reduced to 10 percent when running in straight line. Meanwhile, the overdrive ratio was increased to 2.7% to aid cornering. These changes cut cost and weight considerably, but the system is no longer the SH-AWD we used to know (or explained above). In fact, it is a lot closer to the GKN Twinster system adopted by Range Rover Evoque a year earlier. Ferrari 4RM - Ferrari FF (2011) Ferrari has long been refusing to adopt 4-wheel drive. To Maranello, conventional 4WD systems are just too heavy and bulky for its cars. They would benefit roadholding in rare occasions like running on snowy or wet roads, while most other time the extra weight and size would only worsen performance. Without deviating from its philosophy, Ferrari developed a very special kind of 4WD system called "4RM" in 2011. The technology was first fitted to its new 4-seater GT, FF. The 4RM is a niche design for Ferrari's GT cars. It is built upon Ferrari's traditional FR architecture with a front-mid-mounted engine and a rear-mounted transaxle. The engine must be positioned completely behind the front axle line, something very few cars other than Ferrari can achieve. 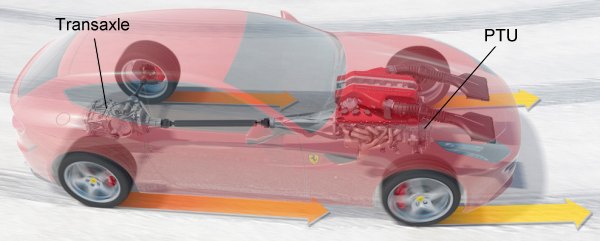 The rear wheels get power just like a conventional FR car. What makes it special is the front-drive hardware. A PTU (Power Transfer Unit) is added just in front of the engine, taking power directly from crankshaft to supply the front wheels. This mean the crankshaft has output at both ends, one goes to the rear transaxle and another goes to the front PTU. The PTU contains a gear set and two wet multi-plate clutches. Each clutch is responsible for engaging a front wheel. By applying hydraulic pressure on those clutches, PTU can alter the amount of torque transferred to individual front wheels. This mean it achieves not only 4-wheel drive but also torque vectoring! But what's the purpose of the gear set in PTU? It offers 2 gear ratios (plus a reverse), so you can see it as a 2-speed gearbox. Now you may question how the speed of front wheels can match those at the rear, which is driven by a 7-speed gearbox. The answer is: they don't match. The gear ratios in PTU are chosen such that the front wheels always spin faster than the rear if the car is lifted up in the air. On the road, this mismatch will force the clutches in PTU to slip all the time. This situation is similar to the PSK system used in Porsche 959 - that car employed front tires slightly larger than the rears, so the multi-plate clutch in its transfer case was always slipping. The case in Ferrari 4RM is far more severe due to the different gearing front and rear. This put its durability into big question.  Never mind. The 4RM is not supposed to be a permanent 4WD system. Ferrari wants to preserve the rear-drive characteristic of its cars as far as possible, thus it needs drive to the front wheels only at extreme moments, e.g. when the car is slipping in hard cornering, or running on slippery surfaces. Therefore it does not need to engage the front wheels all the time. Thanks to modern computer power, the 4RM's control module can engage/disengage the front wheels in a fraction of a second, and for multiple times in a second. Those short moments are already sufficient to put the car back on course. Moreover, the PTU takes at most only 20 percent of the engine torque, so there is no worry of overheating and overstressing it. Of course, one precondition is the gearing difference shall not be too big. That's why Ferrari gives the PTU two forward gears, with the lower gear serving the main gearbox's 1st and 2nd, and the higher gear serving 3rd and 4th. Above 4th, Ferrari considers the car should not be struggling for traction, so the PTU is disengaged, leaving the car to run by rear wheels. The simplicity of 4RM means it has the advantages of lightweight and compact size. The PTU and its associated hardware on Ferrari FF weighs only 45kg, about half the weight of a conventional 4WD system. Compare with other 4WD systems working with front engine and rear-mounted gearbox, such as Nissan GT-R's, its weight and space efficiency are even more obvious. Moreover, it keeps the low center of gravity of FR cars, because the PTU takes power directly from the engine, saving the need to put an additional drive shaft underneath the engine. GKN Twinster - Ford Focus RS Mk3 (2016) The GKN Twinster system on 2016 Ford Focus RS is likely to have a much bigger impact than many other types of electronic-controlled 4WD. On the one hand, it provides very good performance, such as the ability to send 70 percent torque to the rear axle and full torque vectoring between the rear wheels. On the other hand, its construction is simple enough to make it a cost-effective alternative to Haldex clutch, which has been dominating the market since the late 1990s. The Twinster was in fact first introduced in 2013 on Range Rover Evoque, but the one on Focus RS was modified to offer rear-biased power distribution when needed. It consists of 2 parts: Power Transfer Unit (PTU) and Rear-Drive Module (RDM). PTU is located at the front axle beside the transmission. It is made of only simple gearings thus the sole function is to transfer power to the propshaft. What does the magic is the rear-mounted RDM. It consists of 2 hydraulic multi-plate clutch packs, one for each rear wheel. Since the gearing is arranged such that the rear wheels turn 1.8 percent faster than the front wheels, it can make use of the speed difference to transfer power to the rear wheels. When both clutch packs engage to full, 70 percent torque goes to the rear wheels. Reduce the engagement and more torque shifts back to the front axle. If both are disengaged, the car reverts to FWD to save fuel. 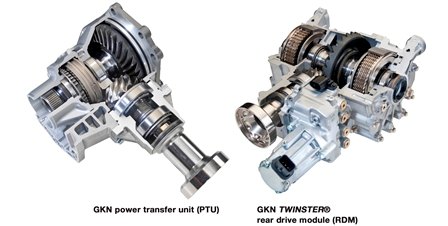 Torque vectoring is achieved by engaging one clutch pack while loosening another. If one is fully engaged and another is open, all the available torque of the rear axle will go to one wheel, so it offers very strong torque vectoring effect. As you can see, the GKN Twinster has no center and rear LSD thus it is lighter than conventional full-time 4WD systems. On the Focus RS, it adds 60 kg including hydraulic system, about the same as a Haldex system. It must be noted that, to avoid overheating or excessive wear to the clutches, the system leaves little torque to the rear axle in normal driving conditions like cruising on highway. However, as shown in road tests of the Focus RS, the Twinster is highly active and responsive in the twisty, showing none of the nose-led character of Haldex cars. Instead, it steers in neutral manner and is even willing to oversteer on throttle. This implies the clutches can take quite a lot of power. Some derivatives of the Twinster, like the one on the aforementioned Range Rover Evoque, have additional clutches on both the PTU and RDM to disengage the propshaft and some internal moving parts during cruising so to cut frictional loss and enhance fuel efficiency. BTW, similar features are also found on Audi's new Quattro Ultra. The Ford Focus RS version skips this feature as it takes too much delay (0.3 second) to revert from FWD to 4WD mode. Audi Quattro Ultra - Audi A4 Allroad (2016) Feeling the pressure of lowering CO2 emission, Audi developed a 4WD system oriented to fuel efficiency instead of handling. It is called Quattro Ultra. The first application is A4 Allroad, but it will be extended to most of the company's less powerful cars with longitudinal engines (aka MLB platform). Meanwhile, powerful and performance-oriented models will continue to use the existing Torsen or crown-gear differential setup. Since its objective is to save fuel, the Quattro Ultra is a part-time 4WD system. It uses a multi-plate clutch, which is mounted just behind the gearbox, to connect the rear axle when more traction is needed. This sounds like the Haldex-clutch system used on the transverse-engined Audis (or VW 4motion). In principles, yes. In engineering details, no, because the key components are developed by supplier Magna. The biggest difference is the multi-plate clutch. While Haldex is actuated by hydraulic, the Magna clutch is operated by electric motor via spindle drive. This results in smoother engagement and disengagement thus the switch between FWD and 4WD modes is nearly imperceptible. On the downside, the electromechanical clutch is not able to handle torque beyond 369 lbft, at least in this first generation.  Another key difference from the Haldex arrangement is that the Quattro Ultra can disconnect the propshaft completely. In this way, the propshaft, rear differential housing and hypoid gear stop spinning. This reduces frictional loss. At the rear axle, there is another disconnect device added to the right rear half shaft. It is an electromechanical actuated dog clutch. Once it is disconnected, the bevel gears in differential will spin without load thus reduces energy loss further. (It must be noted that GKN has a similar system but it can decouple both rear wheels so that the bevel gears stop spinning as well) Overall, Audi claims the Quattro Ultra consumes only 0.2 liter/100km more fuel in NDEC cycle compared with its front-drive alternative, while the existing Torsen setup adds 0.5 liter/100km. Performance-wise, the Quattro Ultra should be no better than Haldex system. In normal running there is negligible torque transferred to the rear axle, or even zero if the system has switched to FWD mode. When the ECU senses wheel slip or a demanding driving style, it re-engages the rear axle. The front multi-plate clutch will engage first, bringing the propshaft and rear differential up to speed and then the rear dog clutch closes to connect the rear wheels. Audi said this process takes at most 0.25 second. Such delay explains why it won't be adopted on performance models. |
||
| Copyright© 1997-2016 by Mark Wan @ AutoZine |