|
AUTOZINE TECHNICAL SCHOOL
Traction & Stability Management Traction Control and Launch Control
It goes without saying traction is a good thing. The more traction a car affords, the faster it can accelerate and the harder you can drive. Modern tires generate a lot of traction thanks to stickier compounds and increased width. Still, there are times when traction could be overwhelmed by power, such as driving on slippery surfaces (wet or snow). Even on dry surfaces, wheel spin can occur if the driver pushes too hard, especially if it is a powerful 2-wheel-drive car. When wheel spin occurs, the friction generated between the tire and the ground drops dramatically. This not only slows down the acceleration but could also cause the car to lose control. That was exactly the headache Saab felt in the early 1990s, when its 9000 Turbo had as much as 200 horsepower to spend over the front wheels. Considering the adverse weather in Scandinavian winter, that was too much a pain to bear. No wonder the innovative Swedish company developed one of the first traction conrol systems, TCS (yes, exactly stands for Traction Control System). Admittedly, Saab was not the first to invent traction control. As early as the 1930s, traction control was already experimented in automotive field. It was a pure mechanical design incorporated with limited slip differential, thus unsurprisingly, it was useless. In the 1970s, GM resurrected the idea on some Buicks and Cadillacs, but this time with electronics. Unfortunately, at a time when "electronics" means transistors instead of microprocessors, GM's attempt was proved to be prematured again. It was not until the late 1980s that computer power was strong enough to meet the needs of traction control. By introducing TCS to Saab 9000 Turbo in 1990 and then spreading out to other models shortly, Saab made itself the first manufacturer to popularize traction control.
Like all the traction control systems available today, Saab's TCS tamed wheel spin by cutting engine power momentarily and applying braking to the spinning wheels when it detected wheel spin. These actions were closely monitored by microprocessor based on signals received from various sensors, such as the rotational speed of individual wheels. As these sensors were already available in ABS, and the processing unit could be incorporated into engine management system, TCS added little cost. Today, traction control becomes pretty much part of the electronic stability control, again because of their hardware sharing. Launch Control is very similar to Traction Control, but its objective is not only to limit wheel spin but also to launch the car from standstill as quick as possible. To that end, Launch Control needs to optimize traction as well as keep the engine working at optimum revs to make the most power (but without overwhelming the available traction). If the car is equipped with self-shifting transmission, Launch Control might need to decide gearshift timing as well. All the driver needs to do is to release the brake and then the car will launch automatically. Launch Control was first developed by F1 teams in the early 1990s as it gave their cars strong advantage in race start (no wonder it was banned later on). Application to road cars came much later - I think well into the 2000s. Nissan GT-R was one of the firsts to put it in the limelight, thanks to its ability to accelerate from 0-60 mph in less than 3 seconds. Today, LC is considered a must on high performance cars. Electronic Stability Control
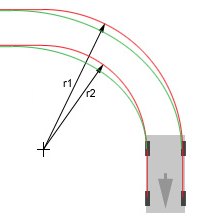
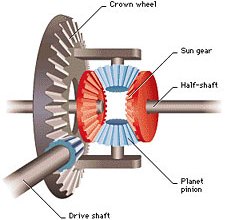
To understand the function of Electronic Stability Control, we must learn some basic theory first. Understeer and Oversteer When a driver turns the steering wheel, he would expect the car to steer exactly the same direction as he has already done, no less and no more. However, in reality, this so-called "neutral steering" is very difficult to obtain. Weight distribution, FWD / RWD / 4WD, suspension geometry, choice of tyres etc. can introduce non-neutral steering. If you want to learn more about the principles behind them, you may read the Handling section of technical school. Correct understeer and oversteer by ESC Electronic Stability Control appeared in the mid-1990s. It was (again) pioneered by Bosch with the collaboration of Mercedes-Benz, as they tested the ESC-equipped 600SEC coupe extensively in snow. Its objective is to correct excessive understeer and oversteer when the car corners too fast or on slippery surfaces. In other words, it ensures cornering stability. Stability control is the next logical evolution of ABS and Traction Control. It shares the hardware of ABS but adds 2 more sensors: steering-wheel angle sensor, which measures the rate the steering wheel is turning, and yaw sensor, which measures the rate the vehicle is actually turning. By comparing them, computer can know if the vehicle is oversteering or understeering. On slippery surfaces or during aggressive maneuver, if the car understeers seriously, the computer will actuate the brakes on the inside rear wheel, just hard enough and just long enough to correct the understeer. Some systems like the one of Bosch may also reduce engine output to cooperate. When the car oversteers seriously, the outside front wheel will be braked instead. Limitation of ESC Unlike 4WD and 4WS, Electronic Stability Control is unable to lift cornering limit. It just prevents the car from exceeding the limit through intelligent control of individual wheels. Therefore, it is a security system for unexpected conditions. Unless you are a novice driver or your car is very unbalanced, ESC cannot help you to corner faster. By applying opposite lock and cooperation of braking, human is able to do better than computer, at least until today*. Moreover, the intervention of ESC could be intrusive if you intend to drive aggressively and to introduce oversteer. Therefore, most good drivers prefer to switch off ESC whenever they want to have fun. As a safety backup device for daily drive, however, ESC is worthwhile. * Note: I first wrote this in the early 2000s. As time went by, more advanced variants of ESC, such as Ferrari's Side Slip Control, have been introduced. It is obvious that computer software can finally beat human. However, these systems use not only brakes but also active differential etc. to do the job thus they are no longer the simple ESC we used to know. Limited Slip Differential (LSD) Introduction Why does a car need differential? Because in cornering the outside wheels travel longer distance than the inside wheels (see picture below). In other words, the outside wheels have to turn faster than the inside wheels. If both wheels on the driving axle are rigidly connected together, the inside wheel will tend to spin, as it is forced to turn as fast as the outside wheel. Of course, we don't want wheel spin because it causes tire wear, loss of traction, instability etc. With the addition of a Differential, the outside and inside wheels are allowed to turn at different speeds. The cornering problem seems to be solved.
A conventional differential, or "open differential", tends to transfer equal torque to both wheels. This is a very important characteristic. Unfortunately, it is also the weakness of open differential. When the road surface gets slippery or uneven, if one of the driving wheels slips, the traction it generates will be dramatically reduced. In other words, the load on that spinning wheel is also dramatically reduced, such that it is much smaller than the load on another wheel. As the open differential always equalizes the torque to both wheels, it will try to shift more torque from the wheel with good traction to the spinning wheel. Consequently, the spinning wheel will spin even faster, while the wheel that affords good traction will get little torque, ridiculously. As a result, the car will be even more difficult to regain traction. That is why we need a Limited Slip Differential. When tire slip occurs, LSD is able to lock up the differential thus keep sending torque to the wheel with traction. There are a few types of LSD still widely used in produciton cars: Torsen LSD (Helical LSD) Torsen stands for "torque-sensing". It is a purely mechanical LSD invented by American company Gleason Corporation in the 1950s. Since then Gleason changed ownership many times. Today it is incorporated into Japanese component manufacturer JTEKT thus the rights of Torsen is held by the latter. Torsen LSD is widely used in 4WD cars as center differential, most notably Audi's quattro system. However, it is also adopted by many rear-drive sports cars or even front-drive hot hatches. A conventional Torsen LSD (now called Torsen A) uses 3 pairs of worm gear/worm wheel to achieve limited slip function. Their gear threads are specially shaped such that torque can be transferred from worm wheel to worm gear but not vice versa. Otherwise, they will be locked up. It is this special characteristic that enables the anti-slip function. 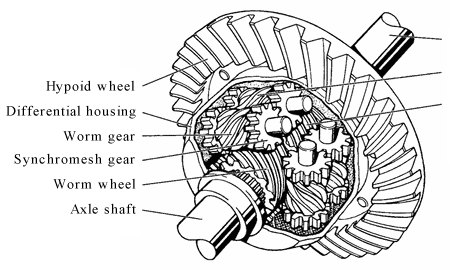 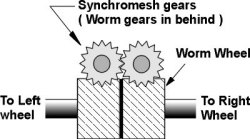 When one wheel loses traction and slip, the differential tries to shift more power to the slipping wheel. Now the worm gear/worm wheel pair gets into effect. The worm wheel of the slipping wheel will drive its worm gear, through the synchromesh and drive the coupling worm gear. That worm gear tries to drive its matching worm wheel, but as we said before, when worm gear drives worm wheel they will be locked up. As a result, the worm wheel/worm gear pair are locked together, thus both wheels will rotate at the same speed and get the car out of trouble. As Torsen is a permanent mechanical design, there is virtually no delay in its response. Torsen B In recent years, many FWD and less powerful RWD cars turn to Torsen B, which is a cheaper variant of the original Torsen A. Torsen B positions the worm gears in parallel to worm wheels. The construction is different, but the working principles are more or less the same. Its parallel gear design is said to be quieter in operation. On the downside, Torsen B is unable to transmit as much torque in lock-up as Torsen A. In engineering terms, this mean it has a lower torque bias ratio (TBR)*. No wonder most powerful RWD cars keep using the original Torsen A differential.  Torsen B LSD of JTEKT * TBR (Torque Bias Ratio): for example, TBR = 5:1 means one wheel can get at most 5 times the torque of another wheel.
Torque-biasing LSD and Helical LSD Although Torsen is trademarked and patented by JTEKT, some other manufacturers came up with similar designs. Among them, Quaife's Automatic Torque-Biasing differential and GKN helical LSD are the most popular. Adopters of the former include Ford Focus RS Mk1 and Mk2, while the latter includes Renault Megane RS Cup. Their working principles are fundamentally the same as Torsen B, just differ enough in detailed designs to warrant their own patents. There are no apparent differences in functions and performance. Strictly speaking, Torsen is also a helical LSD as its worm gears have helical gear threads. However, since Torsen is well known, car makers have no reasons to call it helical LSD instead. Whenever a car is said to employ a helical LSD, it is very likely to be a non-Torsen device like GKN's. Clutch-type LSD (Mechanical LSD) Confusingly, clutch-type LSD is usually referred to "mechanical LSD", although Torsen/helical LSD is also purely mechanical. It is basically a differential added with a pair of multi-plate clutches. When the clutches engage, the differential locks up. There are several different means to activate the clutches (too complicated to be explained here), but all are driven by the acceleration force acted on the axle, thus the differential locks up or not depends on throttle position rather than the load difference between wheels. This seems to be less clever than Torsen, but it works better under extreme conditions. While the torque transfer of Torsen is limited by its torque bias ratio, clutch-type LSD can be completely locked up thus, in case one wheel is airborne, it can transfer all torque to another wheel. In the same situation, Torsen fails to transfer any torque to that wheel, since the airborne wheel gets zero traction thus the other wheel gets 0 * TBR = 0 torque as well. This explains why the earlier versions of Mitsubishi Lancer Evo and Subaru Impreza STi opted for clutch-type LSD at their rear axles.  On the flip side, clutch-type LSD operates in a harsher way because of the abrupt engagement and disengagement of its clutches. It is also more prone to wear out thus is less durable. This explains why later vesions of Subaru Impreza STi replaced it with Torsen following its departure from rallying. Another shortcoming is poorer drivability. Since it locks up the differential completely, if you keep pressing in corner it will push the car into understeer and spin the inside wheel. Nevertheless, advanced drivers may use the understeer to stabilize the car in the initial cornering phase, then lift off throttle and turn the car into oversteer. At corner exit, floor the throttle and lock up the differential again to maximize traction. Cars equipped with clutch-type LSDs are more difficult to drive, but for good drivers it is able to corner faster. In recent years, clutch-type LSD is virtually replaced by the more advanced electronic LSD. It is still present in the aftermarket though. Electronic LSD (Active LSD) Electronic LSD, or Active LSD, is essentially the computerized version of clutch-type LSD. Its multi-plate clutches are controlled by computer through hydraulic system or electric motor. The computer analyses data from various sensors like wheel speeds, g-force, yaw rate, throttle, steering angle etc. to determine whether, when and how much to engage the clutches, so it is smarter than a mechanical LSD and is able to minimize understeer and wheel spin. Moreover, the hydraulic system or electric motor can precisely adjust the degree of lock up, so it can avoid the abrupt engagement/disengagement of mechanical LSDs, resulting in a smooth and linear operation. In short, electronic LSD has all the benefits of mechanical LSD but without of its shortcomings. Electronic LSD was first popularized on rally cars, then on some expensive sports cars, such as the 1995 Nissan Skyline GT-R R33 (the rear differential of ATTESA E-TS PRO system), 2001 BMW M3 E46 (Variable M Differential, supplied by GKN) and 2005 Ferrari F430 (E-diff). In recent years its usage expanded to many high-performance cars, gradually replacing other types of LSD. In 2013, Volkswagen Golf GTi became the first application on front-wheel-drive cars thanks to its Haldex electronic differential. Torque Vectoring Overview When ESP electronic stability control becomes standard on every car and Electronic LSD becomes increasingly popular, the next logical step should be Torque Vectoring, since all the necessary hardware are already in place. While ESP and Electronic LSD intend to keep the car running stably and optimize traction, Torque Vectoring goes one step further: to overcome the physical limitation of the car and sharpen its handling. It can usually do wonders, making a 2-ton, nose-heavy sedan feels as agile as a much lighter, better balanced sports car. It does that by directing torque to individual wheels. For example, when the car is running in understeer, it directs more torque to the outside wheel to help steering the car, sharpening its turn-in and resulting in neutral attitude. If the car is oversteering, it overdrives the inside wheel to regain neutrality. With the introduction of Torque Vectoring, the static balance of the car is no longer that important. No wonder in recent years we found fast Audis no longer trails the better balanced BMWs in handling. There are 3 ways to implement torque vectoring: 1. By brakes: just like ESP, when apply braking to one of the driving wheels, torque will shift to another wheel through the differential. It is the cheapest way to do TV, but not the most effective way. 2. By electronic differential: the multi-plate clutches in e-diff can finely and progressively adjust the amount of torque shift, thus it achieves the best results. 3. By individual electric motors: take Porsche 918 Spyder as an example, each of its front wheels is driven by an electric motor (while the engine drives the rear axle). By applying different power to the front wheels, it can achieve whatever steering attitude it wants. Example: Mitsubishi AYC  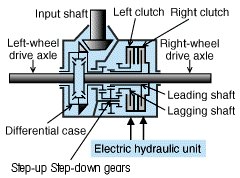 Mitsubishi was probably the first to put torque vectoring in production. It introduced AYC (Active Yaw Control) to the rear differential of Lancer Evolution IV in 1996. The hardware is not dissimilar to active differential. It has a pair of multi-plate clutches, one for each wheel. When computer thinks it is necessary to transfer more torque to one of the wheels, it tightens the clutch of the opposite wheel, thus more torque will be sent to the desired wheel through the open differential. |
||||||||||||||||||
| Copyright© 1997-2016 by Mark Wan @ AutoZine |